
«Если бы я спросил людей, чего они хотят, они бы попросили более быструю лошадь»
Генри Форд об анализе требований заказчика
Современный автомобиль вещь довольно консервативная в базовых своих характеристиках. Несмотря на многочисленные электронные навороты он остается средством передвижения повышенной опасности, управляемым исключительно в ручном режиме при помощи странного биологического процессора, расположенного между рулевым колесом и водительским креслом. Но времена меняются, и технологический прогресс в последние годы серьезным образом подпирает шаткую плотинку здравого смысла. Так что же нам ждать от отрасли в ближайшие пять лет?
Автоматический транспорт
Об инициативах Google тут все, безусловно, знают. Лупастый автомобильчик с бешено вращающейся на крыше камерой вполне успешно справляется с задачей автоматического вождения на испытательных трассах. В город его пока не пускают, но не из-за неэффективности «железа», а из-за проблем с законами, оберегающими жизнь и здоровье людей. Но все в автомобильной отрасли прекрасно понимают, что выход автоматического транспорта на дороги всего лишь дело времени. Эксперты называют 2020 год, и на пути у этой даты не технологии, а только и исключительно законы. Ну, и вполне понятный страх перед страшными роботами-убийцами, управляемыми хакерами-социопатами 
Эксперты GM видят следующие этапы на пути к автоматическому управлению автомобилем, многие из которых уже стали реальностью:
- Информирование водителя без перехвата управления
- Перехват управления в экстренных случаях
- Возможность ограниченной передачи управления (автоматизированный режим)
- Возможность полной передачи управления по инициативе водителя
- Полностью автоматический автомобиль
Применение автоматического транспорта дает много выгод: комфорт, снижение заторов, безопасность, энергоэффективность и т.п. Проблема в том, что польза автоматического транспорта для конечного потребителя сейчас совсем не очевидна. И при этом существует множество нерешенных проблем. Как автоматический автомобиль поведет себя на автостраде, переполненной «обычными» автомобилями? Как обычные водители будут реагировать на маневры автоматического автомобиля? Что нужно сделать, чтобы на дороге всем стало хорошо и более безопасно?
Технические специалисты в один голос говорят пока что только одно — для начала желательно, чтобы все автомобили на дорогах были связаны друг с другом сетью передачи данных.
Связанные автомобили
Современные коммуникации V2V (автомобиль — автомобиль) базируются на стандартной технологии DSRC (Dedicated short-range communications) aka IEEE 802.11p, хорошо зарекомендовавшей себя в системах электронного взимания дорожных сборов. Эксперименты показывают, что автомобиль, на котором установлено оборудование V2V со встроенной антенной, может держать уверенную связь с другими автомобилями в радиусе 800 м. Со стационарными объектами (V2I) — до 1000 м.

Антенны для наружной установки, для установки на лобовом стекле и для скрытой установки в автомобиле
Антенны подключаются к бортовому оборудованию, к которому также могут быть подключены датчики автомобиля через стандартную шину (CAN и т.п.)

Бортовое и придорожное оборудование DSRC
В итоге, имеем энное количество источников данных автомобильной телематики, которые могут содержать позицию автомобиля на основании GPS, данные одометра, акселерометра, признаки торможения, данные от других датчиков, а также данные, принятые по цепочке от других автомобилей. Сразу проблемы:
- Отсутствие стандартов V2V прикладного уровня. В американской рабочей группе IEEE 1609 и в европейской рабочей группе TC204 пока разработаны стандарты нижних уровней. Прикладная тематика в области V2V находится на этапе проектирования.
- Вопросы приватности и защиты системы от преднамеренных манипуляций (что в условиях интенсивного скоростного движения чревато)
- При большом скоплении связанных автомобилей имеет место лавинообразное нарастание количества исходных данных для анализа, что приводит к ошибкам и тормозам бортовых устройств. До конца не проработаны способы эффективной фильтрации данных без ущерба базовым сценариям управления.
Почему DSRC?
Во-первых, на текущий момент отлажена технологическая основа, модель OSI проработана вплоть до уровня приложений. Разработаны протоколы, включая высокоуровневые. Приложения, отлаженные и стандартизированные в настоящий момент в Европе следующие:
- Взимание платы (ISO 14906). Во время проезда автомобиля под антенной организуется защищенный канал связи и формируется транзакция проезда — структура данных, достаточная для расчета размера платы и списания средств.
- Контроль исполнения правил взимания платы (ISO 12813). То же, что и оплата, только другие крипто-ключи и другая информация, поступающая от бортового устройства. Например, госномер, количество осей, информация о контракте, история изменения уровней сигналов, лог качества связи и т.п. (поля можно выбирать)
- Помощь в позиционировании (ISO 13141). Во время проезда в поле действия антенны DSRC в память бортового устройства записывается идентификатор антенны и дополнительная информация о ее местоположении. Крайне полезная фича для случаев, где опираться на данные GPS нельзя, но при этом необходимо получить информацию о том, что автомобиль проехал в определенном месте — в тоннелях, на горных серпантинах, на сложных развязках.
Перечисленные приложения работают в Европе повсеместно. Взимание платы через DSRC работает практически на всех пунктах взимания со шлагбаумами (т.н. полосы с электронной оплатой), а также в режиме свободного потока (в основном для коммерческого транспорта). В США частоты DSRC по-настоящему разрешили использовать только в этом году, поэтому американцы внедряли аналогичные системы в основном с RFID метками вместо DSRC, но работы по стандартизации DSRC, тем не менее, шли своим чередом.
Устройства DSRC используют лицензированный спектр частот, специально выделенный для нужд безопасности дорожного движения. Протокол ориентирован на работу на больших скоростях (устройство быстро просыпается и устанавливает соединение), отвечает всем требованиям по информационной безопасности и хорошо работает в условиях множественных источников сигнала, что является обычным делом в потоке машин.

Спектр DSRC. На нужды V2V выделен сервисный канал 172.
Приложения V2V и V2I. Немного научной фантастики
В рамках короткой заметки трудно достаточно полно раскрыть тему возможностей, которые открывают «умные» автомобили. Сейчас машина, оснащенная радаром, кажется каким-то инопланетным чудом, что уж говорить о по-настоящему связанных автомобилях. Но мечтать не вредно, и далее я перечислю те приложения и сервисы, которые эксперты развивают уже сейчас и которые мы увидим на дорогах в ближайшие пять-семь лет.
Особое значение имеет безопасность. Сразу оговорюсь, теоретики пока не знают толком, что делать в ситуации когда на дороге соседствуют автоматизированные, связанные и обычные автомобили. Поэтому сервисы предполагают значительное (или подавляющее) превосходство связанных автомобилей на дороге.
Сервисы безопасности V2V (автомобиль — автомобиль)
- Избежание столкновения с впереди следующим автомобилем
- Электронные стоп-сигналы. Резко тормозящий автомобиль сигнализирует о применении экстренного торможения, у всех приближающихся сзади включается сигнал или даже перехват управления автоматикой. Сейчас есть аналогичные системы с использованием мерцающих «стопарей» и оптического сенсора
- Предупреждение об автомобиле в слепой зоне. Сейчас есть аналоги на базе радара
- Помощь при смене полосы. Аналогично слепой зоне, но с большим количеством параметров. Индикатор показывает, что перестроение безопасно
- Предупреждение об опасности обгона (см. рисунок ниже)
- Предупреждение о возможных столкновениях на перекрестках (на стендах демонстрируют сценарий выезда на главную дорогу в условиях ограниченного обзора)
- Предупреждение о движении по встречке
- Кооперативный адаптивный круиз-контроль (aka «паровозик»)
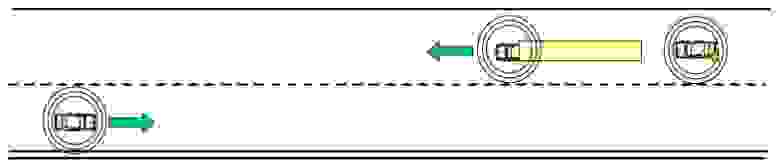
Грузовик предупреждает собирающуюся идти на обгон легковушку об опасности подобного маневра.
Разрабатывается также ряд сервисов V2I (автомобиль — придорожная инфраструктура) в части светофорного регулирования, предупреждения о сложных метеорологических условиях, дорожных работах, поездах на переезде и т.п. О коммерческих сервисах V2V и V2I нужно говорить отдельно и посвятить этому отдельную заметку.
В идеальном мире все перечисленное выше вполне жизнеспособно. Но в реальности светлую картину омрачают «непродвинутые» автомобили, перемещающиеся по той же дороге, «непродвинутые» мотоциклисты и гордые обладатели мопедов, конных повозок и велосипедов. Инженерное и экспертное сообщество в настоящий момент копит экспериментальную базу и разрабатывает комплексные сценарии внедрения технологий V2V, которые позволили бы получить хоть немного реальных преимуществ от прекрасно проработанного технологического бэкграунда. Нам же с вами остается затаив дыхание следить за развитием данного направления. Может быть, даже поучаствовать в его развитии.
- Подробности
- Категория: Новости
 Что такое Connected Car, V2V, V2I, V2P, C2G, V2D?
Что такое Connected Car, V2V, V2I, V2P, C2G, V2D?

Развивающиеся мобильные технологии существенно меняют окружающую среду, проникая во все отрасли, в том числе автомобильную промышленность. В автоиндустрии эта концепция называется Connected Car. Connected Car – это «подключенный» инновационный автомобиль с сетевыми возможностями. Они оснащены средствами навигации и ориентации, связью с Интернетом и т.д. Стандарт пятого поколения 5G только усилит тенденцию внедрения Connected Car.
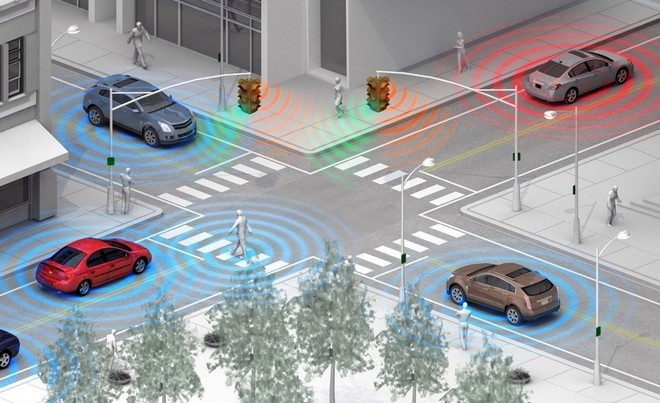
«Умный» автомобиль через сеть взаимодействует с окружающей средой и объектами, поэтому в нем выделяют несколько систем: автомобиль-автомобиль (vehicle-to-vehicle, V2V), автомобиль — инфраструктура (vehicle-to-infrastructure, V2X) и автомобиль-пешеход (vehicle-to-pedestrian, V2P), а также автомобиль — электросеть (vehicle-to-grid, V2G) и автомобиль — устройство (vehicle-to-device, V2D).
Vehicle-to-vehicle (V2V)
Это система беспроводной связи, позволяющая двум автомобилям обмениваться друг с другом информацией о состоянии на дорогах без участия человека. Таким образом, Connected Car сможет получать информацию о скорости движения, местонахождении и т.д. другого автомобиля в режиме Онлайн.
Vehicle-to-infrastructure (V2I)
Это система беспроводной связи, позволяющая автомобилям обмениваться информацией с объектами инфраструктуры, например, со светофорами, дорожными знаками и т.д. И наоборот, получать информацию от них.
Vehicle-to-pedestrian (V2P)
Это система Connected Car, через которую автомобиль может взаимодействовать с находящимися в непосредственной близости от него пешеходами. В рамках подобного взаимодействия электроника автомобиля получит возможность выявлять частотный диапазон смартфонов, которыми пользуются пешеходы, что позволит оценить скорость и направление движения мобильного гаджета, и соответственно пешехода. Это позволит подать сигнал об опасности, как водителю, так и пешеходу с помощью звукового сигнала его телефона.
Vehicle-to-grid (V2G)
Это система, позволяющая подключать машины в общую энергосеть для подзарядки автомобиля или возвращения лишней электроэнергии обратно.
Vehicle-to-device (V2D)
Это система, позволяющая транспортному средству обмениваться информацией с любым электронным устройством, подключенным к самому Connected Car.
Ожидается, что V2V и V2I в совокупности станут первым этапом эволюции автомобильной промышленности к беспилотным автономным транспортным средствам.
Среди главных преимуществ Connected Car можно назвать безопасность. Предполагается, что мониторинг окружающей среды, получение информации о происшествиях на дорогах в режиме реального времени, взаимодействие с другими автомобилями обеспечат безопасное движение как для водителей, так и пешеходов. Не менее важное значение имеет более низкая энергоемкость подобной дорожной инфраструктуры. Однако есть и препятствия скорого развития концепции Connected Car. В первую очередь – это отсутствие правовой базы, регулирующей «общение» автомобилей с другими участниками дорожного движения. Еще одна – это необходимость в построении «умной» среды, в которой к сети будут подключены все объекты (светофоры и т.д.).
Возможности vehicle—to—vehicle (V2V)
Основные элементы V2V, благодаря которым автомобили могут поддерживать взаимную связь, это микропроцессор, модуль передачи информации посредством сетей мобильной или беспроводной связи и спутниковая система навигации GPS.
Как уже было сказано, главная цель развития Connected Car – это безопасность. Цифровая система предупредит водителя о наличии на пути следования транспортного средства, даже если оно не двигается и еще не находится в поле зрения водителя. V2X будут предупреждать о наличие автомобиля на обочине или в «мертвой» зоне, о резком торможении или об участках, где ведутся дорожные работы. Также V2X способен предупреждать столкновение, если, например, за поворотом находится сломанный автомобиль, который не может свернуть на обочину.
Чаще всего, участникам дорожного движения, услышав сигнал автомобиля экстренных служб, не могут определить, с какой стороны он приближается. Дисплей «умного» автомобиля сориентирует водителя о ситуации, а также подскажет, в какой ряд передвинуться, чтобы уступить дорогу. Данная возможность полезна как самим водителям, так и спасательным службам.
V2V, V2X в России и в мире
V2V, V2I в мире
Примеры интеграции различными автоконцернами систем связи в свои автомобили уже есть. Например, громким проектом является анонсированная в 2016 году компанией Tesla Motors полноценная система автовождения. Но взаимодействовать друг с другом транспортные средства разных производителей не могут по причине отсутствия единых стандартов. Поэтому в США их намерены ввести.
В США уже разработали стратегию развития Connected Car. Департамент транспорта США разместил в открытый доступ документ, выражающий намерение обязывать автопроизводителей оснащать автомобили средствами V2V-связи, начиная с 2023 года. Первые внедрения vehicle-to-vehicle должны начаться в 2021 году. В обозримом будущем, а именно 2019 году, власти США планирую принять законодательные нормы, регулирующие технологии Connected Car. Федеральная комиссия по связи (FCC) США уже выделил промышленности частоты для создания и масштабирования национальных систем vehicle-to-infrastructure и vehicle-to-vehicle. Стоимость одной системы V2V-связи оценивается приблизительно в 250-350$. Не стоит забывать, что все дополнительные расходы производителей будут возмещены за счет повышения конечной стоимости автомобиля для потребителя.
V2V, V2I, Connected Car в России
В нашей стране концепция Connected Car только начинает формироваться. Сейчас развивается система «Эра-глонасс», предназначенная для экстренного реагирования при авариях. Она же будет положена в основу интеллектуальной транспортной системы России в целом.
Кроме того, на ее базе реализован коммерческий сервис «ЭРА Транзит», применяющийся в логистике. Он призван контролировать сохранность груза и обеспечивать передвижение транспорта по верному маршруту. В планах специалистов внедрить сервис «ЭРА Помощь на дороге», который будет оказывать техническую поддержку автомобилистам, осуществлять для них технические и юридические консультации и пр.
В России, как и в мире, развитие интеллектуальных дорог замедляет несогласованность проектов. Закрытые платформы и решения несовместимы между собой, что не позволяет объединить заинтересованных участников рынка и сформировать единую эффективную систему мультимодальных грузовых и пассажирских перевозок. Такая инфраструктура позволит снизить стоимость перевозок, при этом улучшив их качество.
Стандартизация V2V, V2I в 3GPP
В основе V2Х лежит технология D2D-коммуникаций или иными словами взаимодействия устройство-устройство (Device to Device). Они специфицированы еще для взаимодействия на близком расстоянии (Proximity Services, ProSe) в Relese 12 и Release 13 3GPP. Принцип D2D может использоваться для транспортных средств, развивающих скоростью до 250 км/ч, и плотностью автомобилей до тысячи узлов. Обе конфигурации используют выделенную полосу для V2V, а также спутниковое геопозиционирование для синхронизации времени.
В сентябре 2016 года консорциум 3GPP завершил первый этап стандартизации сервиса Vehicle-to-everything (V2Х). Положения о стандарте включены в 14-й релиз 3GPP.
Это станет дополнительным драйвером для развития сетей мобильной связи пятого поколения и интеллектуальной транспортной системы.
Если концепция Connected Car оправдает возлагаемые на нее надежды, то количество аварий на дорогах значительно сократится, также как и связанные с ними издержки.
 С техническими особенностями функционирования концепции Connected Car в сетях мобильной связи, а также с другими техническими аспектами работы сетей мобильной связи существующих и новых поколений можно ознакомиться в книге «Мобильная связь на пути к 6G».
С техническими особенностями функционирования концепции Connected Car в сетях мобильной связи, а также с другими техническими аспектами работы сетей мобильной связи существующих и новых поколений можно ознакомиться в книге «Мобильная связь на пути к 6G».
Читайте также:
Книга «Мобильная связь на пути к 6G» заняла 1-е место в Международном конкурсе Interclover-2018
Искусственные нейронные сети и машинное обучение: направления развития, области применения и угрозы для человека
Развитие цифровой экономики в России. Модели и направления
Искусственный интеллект, интернет вещей, машинное обучение — вместе эффективнее.
Умный город. Концепция, стандартизация и реализация смарт сити
Какие вопросы в области мобильной связи Вас больше всего интересуют?
Ответы на самые животрепещущие вопросы пассажиров
{jcomments on}
Карта citytechКарта citytech
![]()
Сервисы перспективных транспортных систем
МАДИ
![]()
Профессор, заведующий кафедры, МАДИ Жанказиев Султан Владимирович выступил на форуме Urban Mobility Forum (30.11.2018).
Темы презентации:
- Разработка и прототипирование моделей управления дорожным движением на основе технических комплексов и сервисов автономных транспортных систем.
- Структура цифровой модели дороги.
- Структура сервисов автономного движения по целям.
- Автономный автомобиль и кооперативная среда. безопасность движения.
- Системы помощи водителям. безопасность движения.
- Классификация сценариев V2Х.
- Структура сервисов автономного движения по целям.
- Автономный автомобиль и кооперативная среда. гармонизация потоков.
- Организация дорожного движения в кооперативной среде.
- Этапы создания цифровой модели дороги.
553Дата добавления:06.12.2018
553Дата добавления:06.12.2018
Добавить мою презентацию
на ICT.Moscow
Что такое ICT.Moscow?
ICT.Moscow — открытая площадка о цифровых технологиях в Москве. Мы создаем наиболее полную картину развития рынка технологий в городе и за его пределами, помогаем бизнесу следить за главными трендами, не упускать возможности и находить новых партнеров.
Создан заказ №1568172
9 декабря 2016
Как заказчик описал требования к работе:
Нужно готовый реферат по этой теме переписать, перефразировать, не искажая смысл.
Заказчик не использовал рассрочку
Гарантия сервиса
Автор24
20 дней
Заказчик воспользовался гарантией, чтобы исполнитель повысил уникальность работы
10 декабря 2016
Заказ завершен, заказчик получил финальный файл с работой
![]()
• Описание и классификация сценариев V2V, V2I;.docx
2017-01-07 20:03
Последний отзыв студента о бирже Автор24
Положительно
Реферат тупо скачали и скинули мне , даже не обработали и не соизволили написать заключение. Позор.
Спасибо за измененные даты литературы.
Хочешь такую же работу?
Зарегистрироваться
Обзор и сравнение V2X технологий +13
Из песочницы, Разработка систем связи, Урбанизм, Разработка для интернета вещей, Интернет вещей
Рекомендация: подборка платных и бесплатных курсов Smm — https://katalog-kursov.ru/

Summary
V2X — это общее название для всех видов коммуникаций между транспортными средствами. Рассмотрим и сравним доступные спецификации, математические модели, увидим какие существуют коммерческие решения в этой области и как их купить в России. Начнем с короткого обзора готовых и разрабатываемых стандартов V2X (IEEE 802.11p, IEEE 802.11bd, 3GPP LTE-V2X, 3GPP 5G NR-V2X и даже немного 3GPP 6G NR-V2X). Вторая часть — это перевод сравнения надежности математических моделей IEEE 802.11bd и 3GPP 5G NR-V2X. Третья часть — обзор коммерческих продуктов для V2X, процессоров и OBU.
Введение
Глоссарий
V2X — vehicle to everything communications
C-V2X — cellular V2X
DSRC — Dedicated Short-Range Communications. Это WIFI-based V2X
LOS — line of sight — линия видимости
NLOS — non line of sight — вне линии видимости
ITS — Intelligent Transport Systems
Midamble — используется в компьютерных сетях для отделения сообщения заголовка от данных, может представлять собой символ или слово
Сценарии использования
V2X технологии мы будем оценивать для сценариев активной безопасности и автономного вождения, что делает короткое время ответа в любых условиях среды основным критерием качества.
Основные сценарии:
- LOS на загородной дороге
- LOS на автомагистрали
- LOS в городе
- в условиях плотного трафика при пересечении перекрестка в городе
- NLOS на автомагистрали
- NLOS в городе
- Бесконтактная оплата проезда на платной трассе
- Регулирование проезда перекрестков
Мотивация
Я инженер с 10 годами опыта в IT. Из них 3 (до 2019) года я занимался тестированием в automotive стартапе. Мой рабочий проект не имел отношения к V2X. Интерес к теме появился после Automotive Testing Expo 2019, на которой я открыл для себя существование рынка V2X устройств и приложений. По оценкам Bloomberg к 2022 году этот рынок будет оцениваться в 1.2 млрд USD.
DSRC
Существующие продукты, работающие по DSRC (Dedicated Short-Range Communications), спроектированы с использованием стандарта IEEE 802.11p.
Это первый V2X стандарт, выпущенный в 2010 году и основанный на WLAN IEEE 802.11a. Редакция стандарта 802.11р, по сравнению с 802.11a, представляет изменения на PHY и MAC уровнях OSI для улучшения производительности классического WLAN для коммуникации быстро движущихся (до 250 км/ч) транспортных средств. На ранней стадии находится следующая версия WLAN IEEE 802.11bd, основанная на WLAN IEEE 802.11ac и обратно совместимой с 802.11p. Планируется улучшение работы в среде с большой плотностью источников сигнала, увеличение пропускной способности до более чем 1Гб/c, возможность работы со слабыми сигналами мощностью 3Дб для увеличения радиуса действия, поддержка определения позиционирования, увеличение относительной максимальной скорости до 500 км/ч.
C-V2X
LTE-V2X — текущая имплементация спецификаций для C-V2X. На ранней стадии находится 5G NR-V2X.
Разработку релизов сотовых технологий координирует 3GPP, 3rd Generation Partnership Project, для обеспечения, по возможности, прямой и обратной совместимости версий стандартов сотовой связи друг с другом. Обратная совместимость стандартов сотовой связи даже законодательно обзятальна согласно директиве Еврокомиссии по стандартизации M/453 и дополнительно ITS Directive 2010/40/EU. 5G NR-V2X и LTE-V2X не имеют обратной совместимости. При разработке нового релиза посчитали, что LTE-V2X не имеет достаточного уровня проникновения, чтобы поддерживать обратную совместимость. 3GPP релиз 8, известный как LTE, вышел в 3 декабря 2009 года и его разработка заняла примерно 3 года. 3GPP релиз 10 LTE-Advanced вышел в 2011 году, 3GPP релиз 14 LTE-V2X — в 2014. Поколение 5G начинается с 3GPP release 15. В релизном расписании 3GPP есть проекты, которые делятся на 3+ фазы, которые почти полностью совпадают с релизами, фазы делятся на 3+ стадии. В каждом случае фаза/релиз с промежуточным индексом 1, 2, 2+ — это спецификации. Индекс 3 означает имплементацию стандартов на физическом уровне. Релизы разрабатываются частично параллельно — разработка следующего начинается раньше релиза предыдущего. В некоторых случаях может быть добавлена стадия 4, которая относится к тестовым спецификациям. Таким образом, согласно 3GPP roadmap, проект 5G все еще на очень ранней стадии. Планируется завершить разработку релиза 16 только к марту 2020 года. По опыту релиза 3G и 4G, можно предположить, что реалистично ожидать готовый к выкатке релиз 5G-NR войдет 3GPP release 17, который случится в конце 2021 года.
На стадии R&D и разработки спецификаций параллельно находится так называемый стандарт 6G, который планируют выкатить в 2030 году. Если 6G также не имеет обратной совместимости с 5G NR-V2X как 5G NR-V2X с LTE-V2X, то, вероятно, организации, заинтересованные во внедрении новых C-V2X технологий, проигнорируют 5G NR-V2X, чтобы дождаться релиза 6G и работать сразу с ним.
Отличия
Главное отличие DSRC от C-V2X с точки зрения коммерческого использования в том, что DSRC в продакшене, стабилен, протестирован, эволюционно и предсказуемо развивается, а C-V2X — нет. OEM-провайдеры и разработчики оборудования могут планировать работу в DSRC технологиями на долгосрочной основе. При этом по техническим характеристикам DSRC не превосходит C-V2X, а в некоторых компонентах и уступает. Проблема с LTE-V2X в том, что не все, необходимые для масштабного внедрения, тесты пройдены, такие как кросс-граничные тесты и кросс-операторные. При этом в релизах 3GPP начиная с 16 и дальше, поддержка LTE-V2X не гарантируется. Таким образом, сравнение LTE-V2X и IEEE 802.11p не актуально в связи с прекращением развития поддержки первого.
Сравнительные характеристики:

6G спецификации очень оптимистичны и носят скорее рекламный характер ради хайпа.
Часть 2. Результаты сравнительных тестов надежности NR-V2X и IEEE 802.11bd от Технического Университета Дрездена 2019 года [ПЕРЕВОД С АНГЛИЙСКОГО]
Примечание переводчика
Перевод не является строго дословным. Были убраны самоповторы где можно и упрощена грамматика где уместно. Спасибо за конструктивную обратную связь.
Авторы
Waqar Anwar, Andreas Trasl, Norman Franchi и Gerhard Fettweis, Vodafone Chair Mobile Communications Systems, Технический Университет Дрездена, Герамания
Аннотация
Ультра-надежные коммуникации позволяют реализовать сложные сценарии, покрывающие автономное вождение и safety-critical приложения. Современные автомобильные коммуникационные технологии, такие как IEEE 802.11p и LTE-V2V не удовлетворяют требованиям надежности для этих сценариев. Разрабатывается следующее поколение этих технологий, способное приблизиться к этим требованиям. В этой работе анализируется расчетная надежность технологий IEEE 802.bd и NR-V2X. И хотя стандарт для физического уровня еще не доступен, мы использовали доступные параметры для нашего исследования. Мы использовали Monte Carlo based симуляции, чтобы анализировать производительность физического уровня этих технологий в различных V2V сценариях. Один главных вызовов (challenges) для ультра-надежной коммуникации является Высокое Допплеровское смещение (High Doppler shift) в V2V сценариях. Показано, что NR-V2X должны превзойти IEEE 802.11bd в надежности из-за лучшей обработки Доплеровского смещения. В IEEE 802.11bd высокое Доплеровское смещение вызывает ошибки пакетов даже при высоком показателе SNR — соотношении сигнала к шуму. Следовательно обсуждаются и рассматриваются различные меры по улучшению производительности IEEE 802.11bd при воздействием высокого Доплеровского эффекта.
Ключевые термины — IEEE 802.11p, IEEE 802.11bd, LTE-V2X, NR-V2X, Ultra-reliable communication.
Введение
Введение примерно о следующем: при наличии радаров, лидаров, всех видов камер, нам дополнительно нужны V2X устройства для условий ограниченной видимости (препятствия, погодные условия, рельеф), работы на большей дистанции и сценариев автономного вождения.
Первый V2X стандарт IEEE 802.11p был представлен в 2010 году и был основан на стандарте беспроводных локальных сетей WLAN IEEE 802.11a. Редакция стандарта 802.11р представил PHY и MAC уровнях, направленные на улучшения производительности WLAN для автомобилей. Альтернативой IEEE 802.11p является LTE-based сотовый V2X стандарт LTE-V2X, представленный 3GPP в 2016 году. Обе технологии подходят для базовых пользовательских сценариев, например уведомлениях о дорожных работах, предупреждении об экстренном торможении, данных со светофоров, уведомлениях о спецтранспорте. IEEE и 3GPP работают над следующим поколением V2X технологий с поддержкой более сложных сценариев. Ожидается что следующий сотовый V2X стандарт основанный на пятом поколении 5G мобильных коммуникационных систем будет закончен в июне 2019 года в рамках релиза 16, имеющий буквенное обозначение 5G NR, где NR значит New Radio. Отсюда название NR-V2X.
Над созданием стандарта IEEE 802.11bd, наследника 802.11p, трудится рабочая группа, названная “IEEE 802.11 next generation V2X (NGV)”.
Сравнению и тестированию, в том числе полевому, 802.11p и LTE-V2X, посвящено много публикаций [1]-[5]. Недавно было опубликовано сравнение производительности в плане ожидаемой пропускной способности, задержки и надежности NGV технологий 802.11bd и NR-V2X [6] (те же авторы что и этого документа). Такие сценарии как совместный адаптивный круиз контроль (cooperative adaptive cruise control) или критичные с точки зрения безопасности приложения имеют высокие требования задержки переключения коробки передач и надежности коммуникационных систем. Достижение надежности связи особенно сложно в автомобилях из-за быстро меняющейся природы среды беспроводного канала связи, что ведет к быстрому устареванию данных оценки канала (channel estimation). В дополнение к высокому Доплеровскому смещению в V2X сценариях, бутылочным горлышком становится intercarrier interference (ICI). Так как Доплеровское смещение существенно отличается в разных сценариях, например сценарий внутригородском Line-of-sight (LOS) отличается от сценария LOS на Трассе, требуется раздельная проверка работы в этих сценариях.
В этой работе мы проверяем работу PHY уровня разрабатываемых V2X технологий 802.11bd и NR-V2X на соотношение ошибок к переданным пакетам (packet error rate — PER). PER часто используется в измерении надежности получателя. Отметим, что надежность важна, потому что в большинстве случаев нельзя использовать ретрансляцию из-за строгих требований к задержке. В этой работе продемонстрировано, что высокие Доплеровские смещения могут приводить к ошибкам пакетов при высоком Signal to Noise Ratio (SNR) в 802.11bd. Это вызвано устаревшей оценкой канала в совокупности с глубокими угасаниями.
Для улучшения оценки канала (channel estimation), используются syncwords или midambles
для предотвращения эффекта насыщения. Показано, что midambles необходимо периодически использовать пропорционально скорости транспортного средства. Для дальнейшего улучшения 802.11bd в областях с низким SNR мы предлагаем использовать фичи, определенные в IEEE 802.11ax, такие как расширенная преамбула диапазона и двунесущую модуляцию (dual carrier modulation DCM). Наконец, производительность 802.11bd после всех этих улучшений оценена и сравнена с производительностью NR-V2X.
Обзор технологий
В этом разделе вы можете найти обсуждение и сравнение наиболее вероятных улучшений будущих стандартов 802.11bd и NR-V2X с их предшественниками.
IEEE 802.11bd
IEEE 802.11p был представлен в 2010 году как редакция стандарта 802.11. С тех пор стало доступно несколько видов реализации PHY уровня для WLAN систем, которые нужно адаптировать для V2X. Можно ожидать, что следующий стандарт 802.11bd будет основан на существующих WLAN технологиях например IEEE 802.11ac и будет использовать доступные PHY конфигурации.
В последних редакциях 802.11 пропускная способность на PHY уровне была увеличена за счет более высокого порядка модуляции и схем кодирования (MCS — Modulation Coding Scheme), более широкополосных конфигураций (more bandwidth), используя carrier aggregation и метод передачи данных multiple input multiple output (MIMO). Был представлен метод проверки четности с низкой плотностью Low Density Parity Check, что более эффективно на бОльших объемах полезных нагрузок, увеличивая скорость и надежность. Надежность была позднее улучшена за счет space time block coding (STBC) или DCM. STBC — конфигурация с разнесенными антеннами, позволяющая двум разнесенным веткам на стороне передатчика, где DCM является частотным разнесением, использовать две разнесенных ветки. Многочисленные cyclic prefixes (CP) временные отрезки позволяют реализовать сценарий конкретного выбора для предотвращения intersymbol interference (ISI), таким образом делая стандарты 802.11 более подходящими для наружной уличной среды (outdoor environment). Использование midambles позволяет реже выполнять channel estimations используя midambles, и позволяет лучше справляться с высокими Доплеровскими смещениями.
Доступна также конфигурация с увеличенным радиусом действия, которая ускоряет синхронизацию и channel estimation, повторяет конкретные поля сигналов преамбулы для увеличения радиуса действия и надежности.
Согласно 802.11bd project authorization report, рассматриваются следующие PHY параметры:
Carrier modulation scheme: OFDM
Subcarrier spacing: 156.25 kHz, и 178.125 kHz.
CP durations: 1.6ms, 3.2ms
Channel coding: LDPC
Lowest rate: MCS9 (? 256-QAM)
Target speed = 250 km/h
Doppler recovery method: high density midambles

Вывод числовых значений из таблицы показан в предыдущей работе этих же авторов.
NR-V2X
Первый сотовый V2X стандарт LTE-V2X был завершен 3GPP в 2016 в релизе 14. Значительные изменения ожидаются с будущим стандартом 5G NR, в котором определены новые V2X сценарии и требования. Финальную версию спецификаций планируют закончить к концу 2019 в релизе 16. На основе возможных настроек физического уровня, мы предполагаем, что NR-V2X будет ориентироваться на NR uplink (UL). Так как NR-UL спецификации уже доступны, можно спроектировать фреймворк для симуляции NR-V2X.
Главное улучшение физического уровня NR UL по сравнению с LTE в том, что для передачи данных можно будет использовать DFT-spread-OFDM и OFDM оба метода. OFDM повышает эффективность пропускной способности (throughput efficiency) для широкополосных операций с более низкой сложностью имплементации (implementation complexity), и, таким образом более, подходящих для приложений, где требуется высокая пропускная способность. В случае низко-бюджетных устройств, где требуется высокая энергоэффективность, DFT-s-OFDM является лучшим выбором в силу своего низкого показателя PARP (peak-to-average power ratio). Другим улучшением представленным в NR стали масштабируемые OFDM numerologies, позволяющие выбирать между различным subcarrier spacing от 15кГц до 480 кГц. Совместно с этими нумерологиями, slot duration находится в диапазоне 1ms — 0.031ms. В отличие от LTE, минимальный интервал передачи данных (transmission time interval — TTI) в NR равен длительности одного слота (one slot duration). В дополнение к коммуникации с низкой задержкой, опция мини-слота предоставлена для передачи данных используя только 2, 4, или 7 OFDM символы без каких-либо границ слотов (slot boundaries). Масштабируемые нумерологии вместе с переменными CP длительностями (durations) в NR предоставляют требуемые для приложений и адаптированности к конкретной среде.
NR также предоставляет различные de-modulation ссылочные (reference) сигнальные (DMRS) опции для лучшего восстановления канала под частотно и временно выборочных (frequency and time selective) каналов. Так как кодирование каналов имеет значительное влияние на надежность и пропускную способность беспроводной связи, применены (в оригинале — adopted) более эффективные и надежные техники кодирования, например LTE турбо коды (turbo codes) заменены LDPC кодами для каналов данных и LTE сверточные коды (convolutional) заменены циклической проверкой избыточности (cyclic redundancy check — CRC) дополненной полярными кодами для контроля канала. Более того NR имеет возможность использовать миллиметровый волновой спектр с частотами выше 24 ГГц также с частотами ниже 6 ГГц. Максимальная ширина канала доступная пользователю в NR равна 100 МГц для частот ниже 6 ГГц и 400 Мгц для передачи данных в миллиметровом спектре, что намного выше чем ширина канала в 20 МГц, доступная для LTE. Большая ширина канала позволяет иметь либо более высокие пиковые значения скорости передачи данных, либо более высокую плотность передающих устройств в NR. Все вышеперечисленные фичи делают NR более надежным, пропускную способность канала более эффективной и гибкой.
V2V сценарии и модели каналов

Набор V2V моделей каналов представленный группой тестирования и оценки производительности 802.11 dedicated short range communications DSRC. Модели каналов получены на основе трех измерительных сессий (measurement campaigns), проведенных несколькими организациями для пяти общих V2V сценариев, как показано на fig 1. Эти модели каналов (channel models) были использованы исследовательской группой 802.11bd для оценки производительности и являются основой (base reference) для дальнейших улучшений. Измеренный профиль RMS задержек и Допплер этих моделей каналов был в общем приведен в Таблице 2

LOS в деревне
Эта модель реализует коммуникацию между двумя транспортными средствами на открытом пространстве. За пределами города LOS коммуникации в общем случае происходят в отсутствие других машин, больших заборов и зданий. Таким образом, полученный профиль задержек демонстрирует сильное влияния LOS компонент в несколькими слабыми многоходовыми (multipath) компонентами и максимальное Доплеровское смещение в 490 Гц.
LOS приближающиеся транспортные средства в городе
Из-за зданий и большой плотности машин, наблюдаются сильные отражения и многоходовое (multi-path) затухание (fading). Из измерений видно, что сильное влияние на сигнал оказывают отраженные компоненты высокой мощности в отличие от загородного LOS сценария.
NLOS городской перекресток
Рассмотрим коммуникацию между двумя приближающимися машинами на городском перекрестке с ограниченной видимостью в движущемся потоке. На углах перекрестка будут здания и заборы, что будет приводить к отражениям и многим многоходовым компонентам (multi-path components). Ввиду отсутствия доминирующей LOS компоненты а небольших отличий мощностей отраженных компонентов, можно ожидать сильное многоходовое затухание.
LOS Автомагистраль
Этот сценарий имитирует коммуникацию между двумя машинами, следующими друг за другом на многополосной магистрали. Несмотря на высокую плотность трафика, знаки, холмы, эстакады, LOS коммуникация все еще возможна, так как нет физических препятствий между коммуницирующими машинами. По сравнению с другими сценариями можно ожидать более высокое Доплеровское смещение из-за высокой относительной скорости между встречными машинами.
NLOS Автомагистраль
Этот сценарий похож на сценарий с LOS за исключением того, что грузовик блокирует видимость между коммуницирующими машинами. Могут возникнуть сильная деградация и изменения в качестве соединения, потому что, из-за высокой скорости потока, нет сильно отражающих объектов в течение длительного периода времени. Это самый сложный сценарий среди всех вышеперечисленных, так как мы имеем дело с NLOS коммуникацией, многоходовым затуханием и быстрое затухание из-за высокого Доплеровского смещения.
Оценка производительности
Теоретические вычисления, приведенные в Таблице 1, могут быть использованы для сравнения технологий в пределах доступных скоростей и задержек передачи данных. Эти значения могут быть достигнуты, только если доставлены все пакеты, что невозможно в физическом мире. Таким образом, в этом разделе производительность обоих технологий оценивается в терминах PER для ранее описанных V2V моделей каналов. PER определяется как отношение ошибок передачи к общему количеству переданных пакетов. Это обобщенный показатель, используемый для оценки производительности и надежности получателя. Мы хотим знать, какая технология работает надежнее в разных условиях. Надежность критична в том числе по причине того, что в большинстве приложений с низкой задержкой перепосылка данных не поддерживается. Несмотря на это, в NR описана возможность отправки гибридного автоматического повторного запроса (hybrid automatic repeat request — HARQ) для улучшения надежности. Мы не рассматриваем эту возможность в этой работе ввиду требования низкой задержки.
Чтобы сравнить производительность этих технологий, была выполнена полноценная имплементация функциональности PHY уровня этих технологий в MATLAB. Чтобы смоделировать быстрое затухание и многоходовые (multipath) эффекты в дополнение к аддитивному белому Гауссовому шуму (additive white Gaussian noise — AWGN), вышеописанные модели были сконструированы с использованием распределения Райса (Rician distribution). В NR-V2X DMRS маппинг типа А c 3 дополнительными референсными символами использованы с максимальной длиной = 1. Используя данную схему, 24 DMRS символы используются внутри временного отрезка (в каждом 3м OFDM символе во время в в альтернативном субносителе (subcarrier) в частоте). Из-за высокой плотности DMRS, возможна лучшая оценка канала (channel estimation). Другие релевантные параметры, использованные в симуляции показаны в Таблице 3.

Для сравнения использованы две комбинации модуляции и скорости кодирования. Мы сравниваем наиболее низкую доступную опцию MCS (MCS0) в обоих стандартах (например QPSK c 0.12 скоростью кодирования в NR-V2X и ? BPSK в 802.11bd), что также определяет радиус действия технологии. Для честного сравнения мы так же сравниваем их для ? 16QAM который относится к MCS13 в NR-V2X и MCS3 в 802.11bd. Мы ограничиваем наш анализ только двумя MCS, которые наиболее релевантны для достижения ультра-надежного соединения. Для проверки соответствия требованиям ультра-надежности необходимо измерить PER<10^-5, что сложно сделать в симуляции за ограниченное время. Таким образом наши оценки ограничены PER=10^-3. Тем не менее для более низких показателей PER производительность может быть спрогнозирована путем продления полученных графиков.
PER сравнение с самым низким MCS
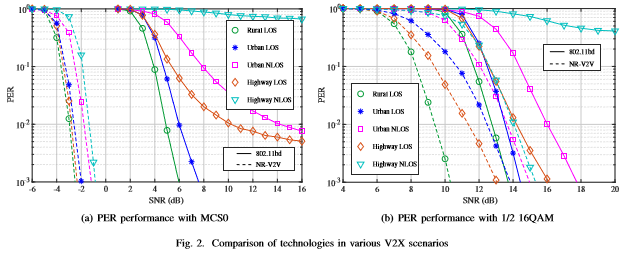
На рисунке 2(а) можно видеть график PER для низшего MCS (MCS0) для обоих технологий и описанных выше V2X моделей каналов. Так как NR V2X и 802.11bd определяют разные комбинации модуляции скорости кодирования, максимальная скорость данных будет отличаться от представленной в Таблице 1.
Можно наблюдать, что NR-V2X ведет себя одинаково хорошо во всех V2V моделях каналов и ее PER имеет незначительное воздействие различными профилями задержки (delay profiles) и Доплеровскими смещениями. Для 802.11bd изменения PER сильно зависят от типа канала. NR-V2X имеет преимущество в 9Дб над 802.11bd, если сравнивать похожий PER в сценарии с загородным LOS и порядка 10Дб в случае сценария с городским встречным движением. Во всех остальных сценариях PER для 802.11bd насыщается (gets saturated), как только оценка канала (channel estimation) устаревает во время передачи пакета. (over the course of packet). Это насыщение происходит, когда отношение длительности пакета ко времени связности (coherence time) больше или равно 1. Если длительность пакета больше, чем время связности (coherence time) канала, оценка канала (channel estimation) больше не валидна для символов в конце пакета. Влияние этой устаревшей оценки каналов зависит от текущей глубины затухания. Если не происходит глубокого затухания (deep fade), можно наблюдать маленькое абсолютное отклонение оценки канала (channel estimation) от ее эталонного значения. В комбинации с глубоким затуханием, это абсолютное отклонение ведет к большой относительной ошибке, которая затем вызывает ошибки передачи пакетов. Чтобы улучшить производительность в быстро изменяющихся каналах, можно использовать midambles, которые рассмотрены ниже. Можно использовать и другие техники для снижения вероятности глубокого затухания, например диверсифицирование.
В отличие от 802.11bd, DMRS-ы встроены в данные для оценки канала в NR-V2X на стороне получателя. Более того, NR-V2X предоставляет различные конфигурации DMRS-ов, в зависимости от времени и частоты выбора канала, что ведет к лучшей оценке канала. Другая причина отличной производительности NR-V2X — это более низкая по сравнению с 802.11bd скорость кодирования — 0.12 < 0.5. Таким образом при использовании MCS0, NR-V2X может достичь большей дальности и надежности по сравнению с 802.11bd.
PER сравнение с ? 16QAM
Ради объективного сравнения технологий, здесь использованы равные скорости модуляции и кодирования. Рисунок 2(b) показывает PER достигнутый технологиями с ? 16QAM в разных V2X моделях каналов. Хотя разница между NR-V2X и 802.11bd значительно уменьшена по сравнению с MCS0, NR-V2X имеет преимущество порядка 3Дб по сравнению с 802.11bd для сценариев загородного LOS, автомагистрального LOS и городского перекрестка NLOS. Преимущество в случае сценария городской встречной LOS модели канала всего лишь 1Дб, и когда используется модель канала автомагистральная NLOS, PER для 802.11bd становится насыщенным ввиду плохой оценки канала (channel estimation), как показано ранее. Производительность 802.11bd c ? 16QAM гораздо лучше по сравнениею с MCS0 для моделей каналов магистральной LOS, магистральной NLOS и городского перекрестка NLOS. Причина улучшений в уменьшенной в 4 раза продолжительности пакетов, так как пиковая скорость передачи данных в 4 раза выше при использовании ? 16QAM по сравнениею с MCS0 (? BPSK). Уменьшенная длительность пакетов приводит к улучшенной производительности для основанной на преамбуле оценке (preamble based channel estimations) каналов 802.11bd, так как уменьшено отношение между длительностью пакета и временем согласованности (coherence time). Если это отношение << 1, насыщение не наступит. (no saturation will occur). Для сценария с NLOS на автомагистрали это отношение больше 1, так как 50% времени согласованности (часто приближенно считается как 9/(16pi*f_d)) = 202ms, что меньше чем длительность пакетов = 236ms.
Причина более высоких показателей для NR-V2X с тем же сочетанием параметров внешней среды и скорости кодирования снова в лучшей оценке каналов (channel estimation) и использованию DFT-s-OFDM. DFT-s-OFDM предоставляют лучшие PER показатели по сравнению с OFDM для frequency selective fading с тех пор как символы данных распределены по всей ширине канала.

Оценка каналов при изменяющихся Доплеровских смещениях
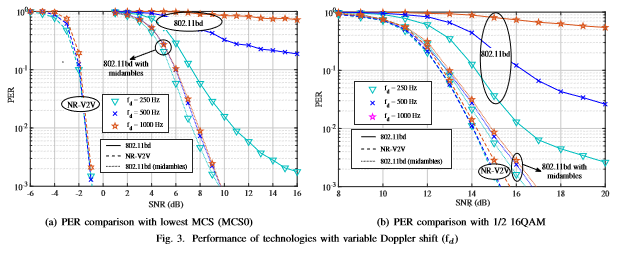
В ранее мы видели, что производительность 802.11bd сильно подвержена влиянию Доплеровского смещения и с основанным на преамбулах оценках каналов. Таким образом, чтобы улучшить производительность, можно рассмотреть применение midamblе, где символ оценки канала (известный как midamble) повторяется внутри данных, чтобы получить текущую оценку канала, как показано на Рисунке 4. Периодичность midambles следует адаптировать согласно относительной скорости движения транспортных средств. Низкочастотные midambles приведут к ошибкам оценки каналов, а высокочастотные midambles повысят длительность пакетов (обратно пропорционально скорости передачи данных). Чтобы оценить технологии под воздействием изменяющегося Доплеровского смещения, мы выбрали сценарий с автомагистралью NLOS, который является худшим случаем. Доплеровский профиль канала масштабирован для трех максимальных Доплеровских сдвигов равных 250 Гц, 500 Гц, 1000 Гц. Для 802.11bd предположим два набора настроек — один набор без midambles, второй — с адаптивными midambles.
Периодичность midambles = 10, 5 и 3 OFDM символов для 250, 500 и 1000 Гц соответственно. С этими параметрами периодичность midambles примерно равна 90% от времени связности для всех трех Доплеровских смещений.
Рисунок 3(а) показывает PER для MCS0 для разных доплеровских сдвигов. Видно, что NR-V2X очень надежен под воздействием Доплеровских смещений из-за высокой плотности DMRS, используемых для оценки канала и очень низкой скорости кодирования. И хотя высокие Доплеровские смещения также вызывают ICI (Inter-carrier interference), для более медленных SNR значения шума более доминантны чем ICI, следовательно это не имеет значения в этом случае. Как показано ранее, производительность 802.11bd ухудшается с возрастающими Доплеровскими смещениями из-за устаревания оценок каналов. Использование адаптивных midambles сильно улучшает производительность 802.11bd и помогает преодолеть минимальный уровень ошибок оценки каналов, учитывая что периодичность midambles существенно больше чем время связности канала. Хотя добавление midambles убирает PER насыщение в 802.11bd, все еще наблюдается разница в 10Дб по сравнению с NR-V2X.
Похожее сравнение представлено на рисунке 3(b) для случая с ? 16QAM. Снова из представленных результатов следует, что высокая надежность 802.11bd возможна только при использовании midambles. Даже с эквивалентными скоростями модуляции кодирования NR-V2X имеет более чем 1 Дб преимущество для всех Доплеровских смещений. Видно, что ICI становится все более заметной на высоких значениях SNR. Таким образом разница в PER между технологиями увеличивается для разных значений Доплеровских смещений с увеличением SNR.
Эффекты DCM и опция расширенной дальности
В предыдущей подсекции мы показали, что добавление midambles может существенно улучшить производительность 802.11bd. Ему все еще нужно как минимум 10Дб SNR чтобы достичь PER 10^-3 в то время как NR-V2X может достичь той же цели с SNR менее 0Дб. Чтобы в будущем улучшить производительность 802.11bd в областях с низким SNR и достичь цели увеличения дальности в 2 раза по сравнению с 802.11p, можно адаптировать режим увеличенной дальности и DCM из 802.11ax. Используя режим увеличенной дальности (range extension mode), сигнальное поле (signaling field) повторено дважды и мощность определенных полей преамбулы (preambula fields) сильно увеличены, что улучшает чувствительность получателя на 3Дб. В DCM данные дублируются на нижней и верхней половине доступных subcarriers для улучшения частотной диверсификации и частотно-избирательных каналов. IEEE 802.11ax предоставляет эти опции для нижних порядков MCS для улучшения производительности края ячеек (cell edge performance). Улучшение производительности, достигаемое за счет включения этих опций в 802.11bd является предметом обсуждения этой секции.

Прирост производительности для 802.11bd при использовании режима расширенной дальности и DCM показано на Рисунке 5. 802.11bd показывает ~ 5 Дб прирост после включения этих опций. Спектральная эффективность NR-V2X c MCS0 в 2 раза меньше в сравнению с 802.11bd MCS0. После включения DCM спектральная эффективность 802.11bd уменьшилась в 2 раза и стала равной NR-V2X MCS0. Даже хотя DCM и увеличение дальности улучшают показатели 802.11bd на 5Дб, NR-V2X требуется на 5Дб меньший SNR чтобы достичь тех же результатов PER c той же спектральной эффективностью. Так как при использовании DCM спектральная эффективность уменьшается в 2 раза, то и другие диверсифицированные опции можно использовать для достижения похожего прироста без затрат на уменьшенную спектральную эффективность, таких как STBC или диверсификация приема сигнала(receive diversity). При диверсификации приема, антенны помещаются достаточно далеко друг от друга, таким образом полученные сигналы на обоих антеннах показывают не связанные затухания. Таким образом могут сделаны дальнейшие улучшения для использования этих опций.
Заключение
В этой работе проведено сравнение производительности разрабатываемых технологий V2X в различных V2X сценариях на предмет надежности. Основываясь на результатах, было показано что NR-V2X совершенней 802.11bd, во многом потому что 802.11bd сильно подвержен доплеровским сдвигам. Более того мы показали что использование midambles значительно улучшает производительность 802.11bd под воздействием высоких Доплеровских смещений, при условии что период midambles сильно меньше периода связности канала. Мы показали, что DCM и режим расширенной дальности повышают производительность 802.11bd. Несмотря на то что midambles, преамбулы режима расширенной дальности и DCM показали возможность улучшения надежности 802.11bd, он все еще не может превзойти NR-V2X по причине лучшей оценке каналов из-за высокой плотности DMRS, более низких скоростях кодирования и DFT-s-OFDM. В будущем работа будет сфокусирована на проектировании аналитических методов, таких как PHY абстракция для расширения сравнения для других целевых приложений и сценариев.
Источники оригинала
[1] S. E. Carpenter and M. L. Sichitiu, “Analysis of packet loss in a large-scale DSRC ?eld operational test,” in 2016 International Conference on Performance Evaluation and Modeling in Wired and Wireless Networks (PEMWN), Nov 2016, pp. 1–6.
[2] A. Bazzi, B. Masini, A. Zanella, and I. Thibault, “On the performance of IEEE 802.11p and LTE-V2V for the cooperative awareness of connected vehicles,” IEEE Transactions on Vehicular Technology, vol. PP, pp. 1–1, 09 2017.
[3] W. Anwar, K. Kulkarni, T. R. Augustin, N. Franchi, and G. Fettweis, “PHY abstraction techniques for IEEE 802.11p and LTEV2V: applications and analysis,” in 2018 IEEE Global Communications Conference, Abu Dhabi, United Arab Emirates, Dec. 2018.
[4] A. Bazzi, C. Campolo, B. M. Masini, A. Molinaro, A. Zanella, and A. O. Berthet, “Enhancing cooperative driving in IEEE 802.11 vehicular networks through full-duplex radios,” IEEE Transactions on Wireless Communications, vol. 17, no. 4, pp. 2402–2416, April 2018.
[5] X. Huang, D. Zhao, and H. Peng, “Empirical study of DSRC performance based on safety pilot model deployment data,” IEEE Transactions on Intelligent Transportation Systems, vol. 18, pp. 2619–2628, Oct 2017.
[6] W. Anwar, N. Franchi, and G. Fettweis, “Performance evaluation of next generation V2X communication technologies: 5G NRV2V vs IEEE 802.11bd,” submitted to VTC fall 2019.
[7] R. Cao, H. Zhang, and P. Sharma, “Potential PHY Designs for NGV,” IEEE 802.11-19/0016r0, 01 2019.
[8] 3GPP: Initial Cellular V2X standard completed, [Accessed on] 27th Nov. 2016. [Online]. Available: www.3gpp.org/newsevents/3gppnews/1798v2x r14
[9] 3GPP, “Technical speci?cation group services and system aspects; study on enhancement of 3GPP support for 5G V2X services,” 3rd Generation Partnership Project (3GPP), Technical report (TR) 22.886, 09 2018, version 16.1.1.
[10] 3GPP, “NR; Study on Vehicle-to-Everything,” 3rd Generation Partnership Project (3GPP), Technical Report (TR) 38.885, 11 2018, version 1.1.0.
[11] 3GPP, “NR; Physical layer procedures for data,” 3rd Generation Partnership Project (3GPP), Technical Speci?cation (TS) 38.214, 09 2018, version 15.3.0.
[12] M. Kahn, “IEEE 802.11 Regulatory SC DSRC Coexistence Tiger Team V2V Radio Channel Models,” IEEE 802.11-14/0259r0, Feb. 2014.
[13] 3GPP, “NR; Physical channels and modulation,” 3rd Generation Partnership Project (3GPP), Technical Speci?cation (TS) 38.211, 09 2018, version 15.3.0.
[14] T. S. Rappaport, Wireless communications: Principles and practice, 2nd ed. Prentice Hall, 2002.
Часть 3. V2X устройства доступные для тестирования на рынке
Summary
Во-первых отмечу что заказать устройство в россию практически не возможно ни за какие деньги. Если вы соберетесь покупать V2X 802.11p или LTE-V2X-совместимое устройство (от 2000 Евро), то во-первых, разработчики и дистрибьюторы почти никогда не покупают лицензию на импорт своей продукции в РФ, соответственно никто не знает что может произойти на таможне, сколько денег с вас захотят взять на таможне, сколько может продлиться выяснение, оформление и прочая бюрократия. Таким образом стоит это дорого, ехать это может от 3 месяцев без гарантии что это пустят через границу, все риски на вас. Есть вариант купить такое устройство у российской компании-импортера, но как правило такие компании не заказывают единичные экземпляры так как это не выгодно, то если вы не собираетесь закупиться оптом, это тоже не ваш вариант. Остается либо заказывать тестовые устройства на адрес в Евросоюзе и в ручной клади провозить это на родину, либо ехать непосредственно на склад и опять же ручная кладь.
Я провел небольшое исследование доступных V2X устройств на рынке. Протестировать не удалось за отсутствием финансирования на приобретение оных. А стоят они дороговато. Ниже подробнее какое сколько.
Продкуты
OBU
V2X communication processors
Приобрести полупроводниковые компоненты легче и дешевле, чем готовые продукты. Но в этом случае придется собирать OBU собственными руками, что сложно.
Заключение
Начали с краткого обзора существующих технологий, с summary спецификаций. После него мы сделали вывод, что исследовательского интереса 802.11p и LTE-V2X не представляют, так как следующие поколения уже находятся поздней стадии разработки спецификаций а 5G NR-V2X не совместим с LTE-V2X. В следующей части был приведен перевод сравнения моделей на базе доступных спецификаций стандартов 802.11bd и 5G NR-V2X. В последней части приведен краткий обзор существующих продуктов на основе 802.11p. На момент публикации не существовало коммерческих продуктов, созданных на основе 802.11bd или 5G NR-V2X в, соответственно они в обзор не вошли.
Таким образом, видно, что рынок V2X устройств все еще очень молодой и небольшой. Скромное проникновение V2X технологий на мой взгляд связано в том числе с тем, что доступные коммерческие продукты не удовлетворяют высоким требованиям low-latency приложений. В случае появления решений, которые смогут значительно повысить автономность транспортных средств, нас ждет взрывной рост рынка и проникновения технологий V2X.
Список источников
- Technology and Industry Development of Connected and Automated Vehicles by Yu Rundong, Technology and Standards Research Institute, CAICT
- 2018-9-14
- V2X Functional and Performance Test Report; Test Procedures and Results by 5GAA Automotive Association 2019
- A Speculative Study on 6G, Faisal Tariq, Member, IEEE, Muhammad R. A. Khandaker, Senior Member, IEEE, Kai-Kit Wong, Fellow, IEEE, Muhammad Imran, Senior Member, IEEE, Mehdi Bennis, Senior Member, IEEE, and Me ?rouane Debbah, Fellow, IEEE
- Application-Oriented Performance Comparison of 802.11p and LTE-V in a V2V Communication System by Mengkai Shi and Chang Lu, SINGHUA SCIENCE AND TECHNOLOGY ISSNll1007-0214 01/11 pp123–133 DOI: 10.26599/TST.2018.9010075 Volume 24, Number 2, April 2019
- On the Reliability of NR-V2X and IEEE 802.11bd by Waqar Anwar, Andreas Tra?l, Norman Franchi and Gerhard Fettweis Vodafone Chair Mobile Communications Systems, Technische Universita ?t Dresden, Germany {waqar.anwar, andreas.trassl, norman.franchi, gerhard.fettweis}@tu-dresden.de, September 2019
- U-NII-4-TO-DSRC EMC TEST AND MEASUREMENT PLAN PHASE I: FCC LABORATORY TESTS
- ET Docket No. 13-49, October 7, 2016
- Ready to roll: Why 802.11p beats LTE and 5G for V2x A white paper by NXP Semiconductors, Cohda Wireless, and Siemens 2016
- C-ITS: Three observations on LTE-V2X and ETSI ITS-G5—A comparison by Andrew Turley, Kees Moerman, Alessio Filippi, Vincent Martinez 2018
- Physical Layer Evaluation of V2X Communications Technologies: 5G NR-V2X, LTE-V2X, IEEE 802.11bd, and IEEE 802.11p by Waqar Anwar, Norman Franchi, and Gerhard Fettweis Vodafone Chair Mobile Communications Systems, Technische Universita ?t Dresden, Germany {waqar.anwar, norman.franchi, gerhard.fettweis}@tu-dresden.de, September 2019
- V2X Technology Benchmark Testing by 5GAA Automotive Association, September 2018
Дорожная обстановка в современном мире и с современным плотным трафиком меняется буквально каждую секунду. И избежать аварии, заранее прогнозируя ближайшие события и действия других водителей, становится всё труднее. Но представьте, что Вы едете за впереди идущим авто, и на заднем стекле водитель сообщает, что впереди него помеха, и сейчас он будет экстренно тормозить. Интересно, не правда ли?! Именно так и работает технология «Vehicle 2 Vehicle» (V2V), только сообщения высылает не водитель, а непосредственно сам автомобиль.
Многие транспортные средства в настоящее время предлагают передовые функции безопасности, такие какавтономные тормозные системы и контроль над слепыми зонами, используя при этом разного рода датчики и камеры для оценки окружающей обстановки. Но технология V2V идёт в этом плане на один шаг дальше.
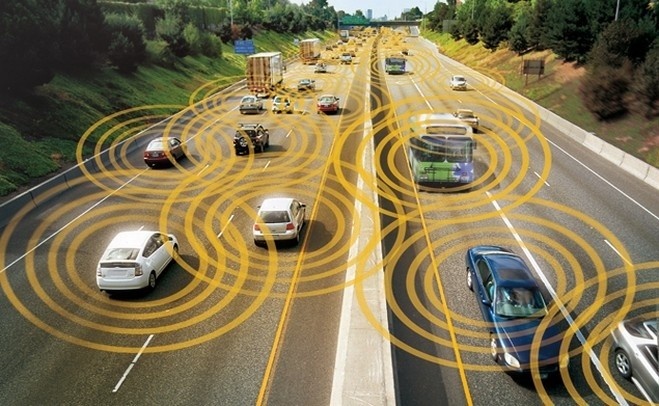
Vehicle 2 Vehicle (V2V) — это система обмена беспроводными сигналами автомобиля с другими рядом двигающимися автомобилями — обмена данными о скорости соседних автомобилей, и статусе торможения и положения, чтопозволяет автоматически реагировать на внезапные изменения дорожной ситуации, чтобы избежать ДТП.
Потенциал для повышения безопасности дорожного движения огромен. На самом деле по оценкам результатов исследования этой технологии, V2V может предотвратить более 500 000 ДТП и более 1 000 смертей в автокатастрофах ежегодно. Но большим недостатком, очевидно, является то, что технология должна быть установлена на большом количестве автомобилей, чтобы эффективно работать — в противном случае, автомобилям с V2V попросту не с кем будет «поговорить». Ещё одной проблемой является диапазон радиочастот, на котором работает V2V — 5,9 ГГц. Этот диапазон используется для цифровой связи Wi-Fi и требуется выделиться часть частот для новой технологии.
Ещё в августе 2012 года состоялось исследование и пробный запуск автомобилей с коммуникацией V2V в Анн-Арбор, штат Мичиган, США. Согласно исследованию, 3 000, оборудованных технологией V2V (работающей по Wi-Fi), выкатились на улицы городов с обычными водителями за рулём, чтобы начать сбор данных с целью определить:
- Какие виды данных являются наиболее полезными?
- Сколько минимум автомобилей потребуется, чтобы технология начала практически положительно влиять на статистику аварийности?
- Как водители за рулём будут реагировать на внезапно появляющуюся информацию об изменении дорожной обстановки?
Как работает V2V?
Если заглянуть в общем плане в техническую начинку технологии, то Vehicle 2 Vehicle сочетает в себе традиционные современные технологии, такие как GPS, Wi-Fi и, конечно же, датчики самого автомобиля и бортовой компьютер. Многие современные автомобили оснащены многочисленными датчиками (дождя, экстренного торможения и быстрого ускорения и т.п.). В то время, как Вы едете, Ваш автомобиль собирает все эти сообщения, вычисляет риски и позволяет узнать о чём-нибудь опасном заблаговременно, чтобы значительно повысить уровень безопасности Вашей поездки.
Расскажите нам в комментарии, что Вы лично думаете об этой технологии.
Автомобильные сети Обучение ноты
Во-первых, автомобильная сеть
1.1 Основная концепция
Автомобиль подключен к машине и все, поэтому есть концепция: v2x (транспортное средство — все).
- vehicle-to-vehicle (V2V)
- vehicle-to-infrastructure (V2I)
- vehicle-to-network (V2N)
- vehicle-to-pedestrian (V2P)

1.2 Сценарий приложения
V2V: технология связи V2V — это технология связи, которая не ограничена фиксированными базовыми станциями, обеспечивая прямую концевую беспроводную связь для автомобиля. В основном включает в себя: относительное местоположение информации, скорость и т. Д.
Во-вторых, DSRC
2.1 Основная концепция
DSRC (посвященный коммуникации в короткие сроки) Специальный короткометражный коммуникация
Международный DSRC Special Communication Communication Technology появился три основных полоса рабочей частоты: 800-900 МГц, полоса частот, в настоящее время в нашей стране находится из ISO / TC204 Международной стандартизации Организации стандартизации интеллектуальной транспортной системы технологий (China Number SAC / TC268) 5.795- 5.815 ГГц ISM-диапазон, нисходящей линии связи (D-Link) 500KBP, 2-Am; Uplink (U-Link) 250KBP, 2-PSK Технические стандарты.
Стандарт DSRC в основном включает в себя два типа оборудования:
- Дорожный боковой блок RSU (дорожные единицы)
- Встроенный подразделение OBU (бортовое подразделение).
Он также создан посредством связи между RSU и OBU, так что автотранспортные средства (оснащенные OBUS) включают автомобили и придорожное оборудование, когда у них есть дверная рама с антеннами РСС в середине среды (50-60 км / ч). RSU обмен данными. Базовый передаваемый блок передачи данных является блоком данных протокола PDU (блок данных протокола)
1.2 Применение
Например: etc etc
1.3 Похожие стандарты
| Стандартный | имя |
|---|---|
| IEEE 802.11p-2010 | Wireless LAN Mac Слой и PHY Спецификация: Протокол сети автомобиля |
| IEEE 1609.0-2013 | Волновая архитектура |
| IEEE 1609.1-2006 (недействительный) | Управление волнами ресурсов |
| IEEE 1609.2-2016 | Волновая приложение и управление сообщениями |
| IEEE 1609.3-2016 | Волновая сетевая служба |
| IEEE 1609.4-2016 | Волна многоканальная операция |
| IEEE 1609.5 | WAVE — Communication Manager |
| IEEE 1609.6 | WAVE — Remote Management Service |
| IEEE 1609.11-2010 | Волна воздуха электронные платежные данные обмен данными |
| IEEE 1609.12-2016 | Присвоение идентификатора волн |
| SAE J2735-201603 | Словарь набора сообщений DSRC |
| SAE J2945.1-2015 | Система безопасности V2V Автомобиль Минимальные требования к производительности |
| SAE J2945.2-2015 | V2V Security информирует о требованиях DSRC |
| SAE J2945.9-2015 | Требования к производительности для дорожных боковых пользователей Безопасная связь |
Примечание: онлайн поиск, не должен быть полным и старым
В-третьих, C-v2x
Последнее продолжение
использованная литература
- Технология C-V2X не далеко, первое коммерческое решение Huawei, Qualcomm Demo Direct Communication
- Ternet-V2x Введение, V2x Существующие две основные стандарты связи DSRC и LTE V2X
- Процесс протокола DSRC
- Анализ и внедрение системы ETC и протокола DSRC
- V2x Общественные данные Отделка
- DSRC и C-V2X, V2X Два метода связи. Сравнение методов
- DSRC (V2X) стандарт
- 5G Автомобильная сеть Стандартная эволюция Дорога